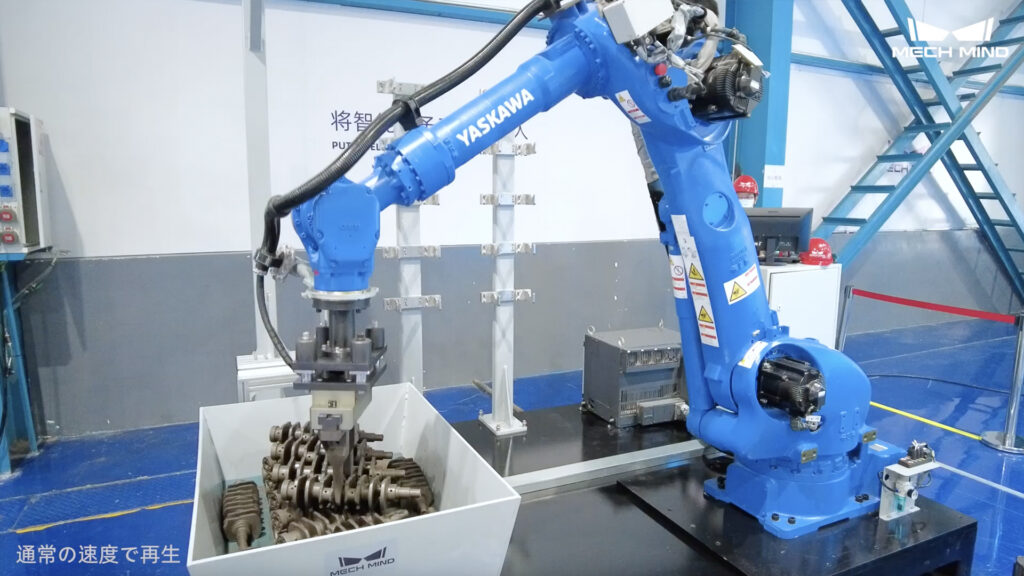
プロジェクトの課題
対象物:多種類 / 複雑な形状 / バラ積み
解決方法
1. 高精度・迅速な撮像が可能なMech-Eye PRO Mを採用
2. 約2,000種類あるワークに迅速に対応
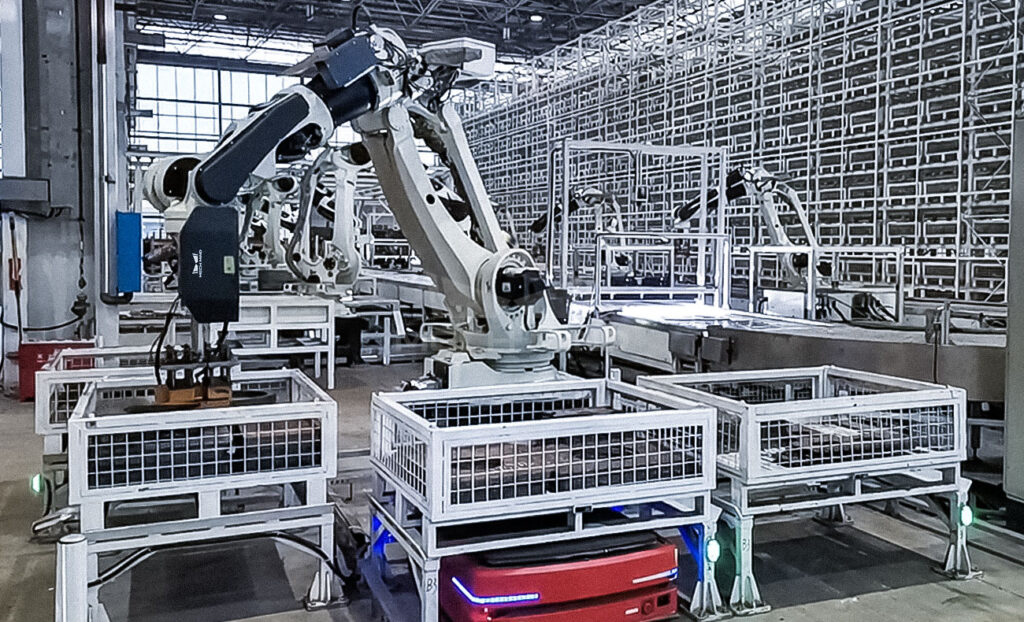
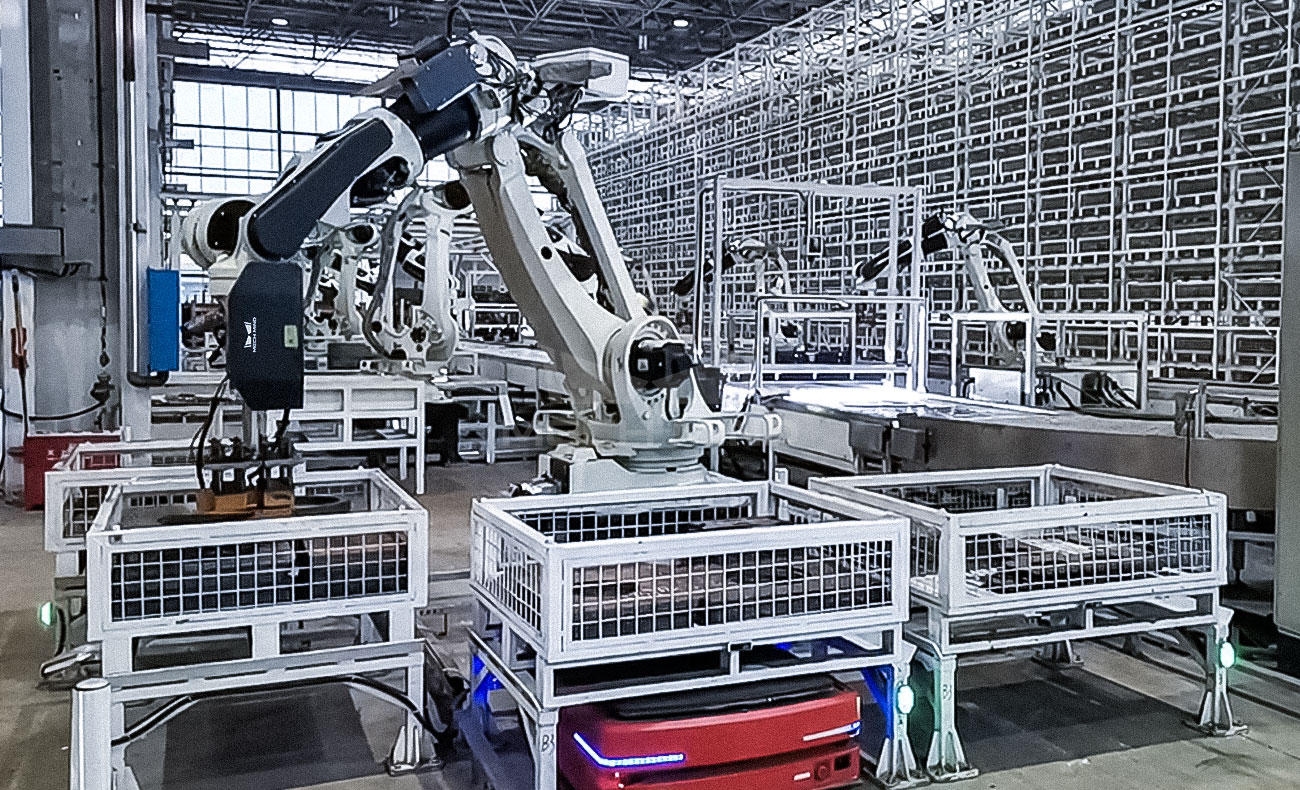
3. 知能的な衝突検出と軌跡計画により、深いコンテナからピッキングする際の衝突防止・取り切り率向上
4. 複数のマッチングアルゴリズムにより、類似・対称ワークを着実に区別することが可能
5. カメラをロボットアームの先端に搭載することで、複数のコンテナに対応
成果
多種類 / 複雑な形状 / バラ積みといった複雑な現場の自動化を実現