
プロジェクトの課題
・対象物:規格が異なる段ボール箱・発泡スチロール箱(蓋が開いている状態)が大量に存在
・その他:1パレットに対し、4エリアに分類した異なる段ボール箱と発泡スチロール箱をデパレタイジング、かつ高い安定性とタクトタイムが求められる
解決方法
1. 産業用3Dカメラ Mech-Eye DEEPをスライド式のレールに搭載し、任意の位置への移動と撮像を実現
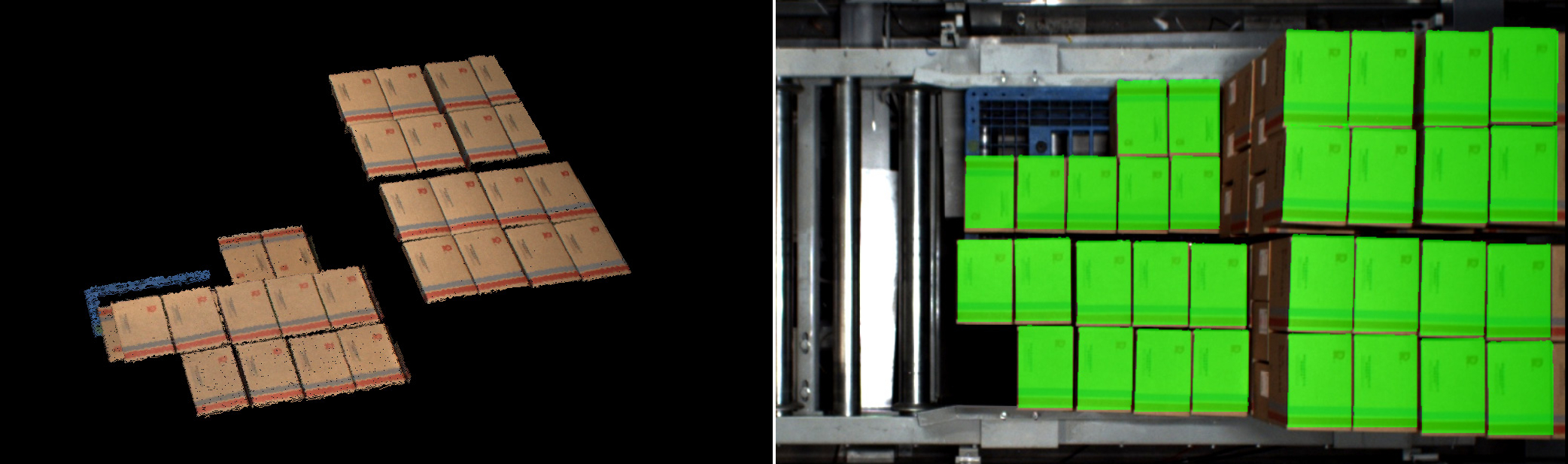
2. 表面の明るさや、テープ / 結束バンド / ラベルがあるものなど、複雑な状態の段ボール箱を認識
3. 段ボール箱の側面にあるバーコードの縞模様方向も認識可能なため、どの面にバーコードがあるかを判別
4. 対象物が単数、または複数の場合のパレタイジング・デパレタイジング、継続パレタイジング*を実現
(※途中まで積み付けられたパレットに対し、再度積付けを行うこと)
5. 段ボール箱の新品種に対し、学習不要で迅速に対応
6. 衝突検出と智能軌跡計画アルゴリズムにより、ハンドと対象物、対象物同士の衝突を避け、動作の安定性を向上
7. AIアルゴリズムにより、AGV / コンベア / WMSなどと組み合わせることで、複雑な現場の自動化を実現
成果
人の手を介さない完全自動化生産を実現
