プロジェクトの課題
・現場環境:強い外乱光があることに加え、開先加工には高精度なビジョンシステムが必要
・対象物:数千種類のワークを積み上げて面取りを行うため、類似ワークや対称ワークが多数存在
・その他:従来のロボットティーチングでは、新品種ワークの迅速な対応が困難

解決方法
1. 高度なマッチングアルゴリズムにより、類似ワークや対称ワークを安定して認識
2. 数千種類のワークを迅速に認識し、ワークの均一性問題を解決
3. 鋼板に最適な把持位置を算出し、磁気吸引による安定したピッキングを実現
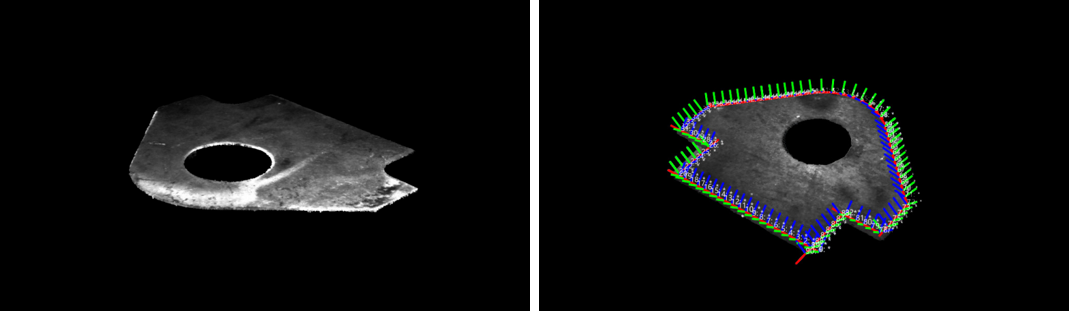
4. ティーチング・プログラミング不要で切削加工のパラメータをマッチングさせ、開先加工の軌跡を自動生成
5. 開先加工の一貫性と安定性を実現
【成果】
1. 特別な位置決めツール不要で複数ワークの連続開先加工を実現
2. 全体の生産効率を約4倍向上