プロジェクトの課題
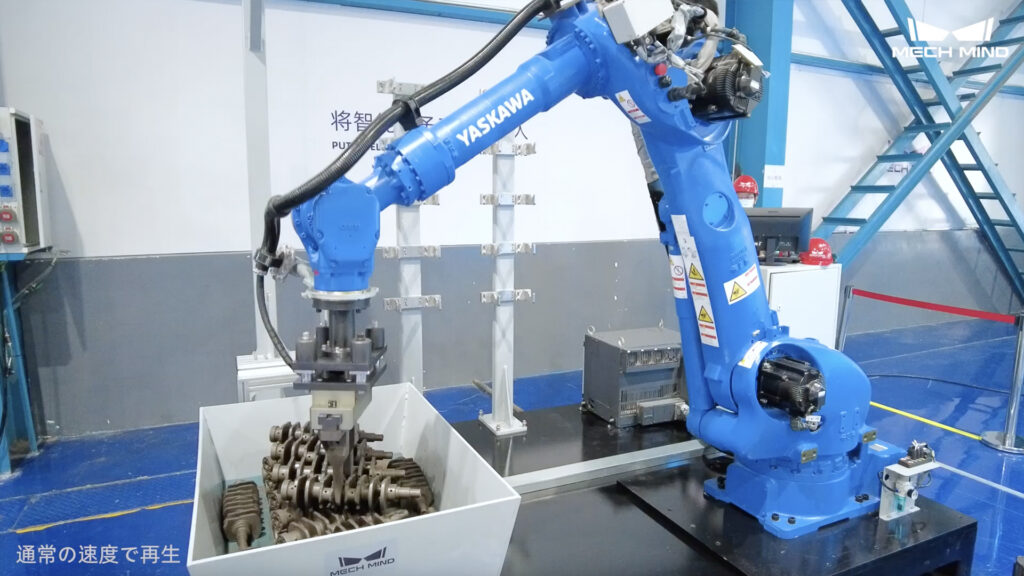
対象物:認識が必要なピンホールは小さい / 一定の反射を伴う / 変形しやすい状態

解決方法
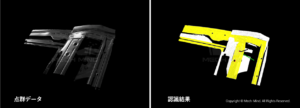
1. インナードアパネルの小さなピンホールを高精度に認識・位置決め
2. 反射、変形しやすいといった状況にも対応可能
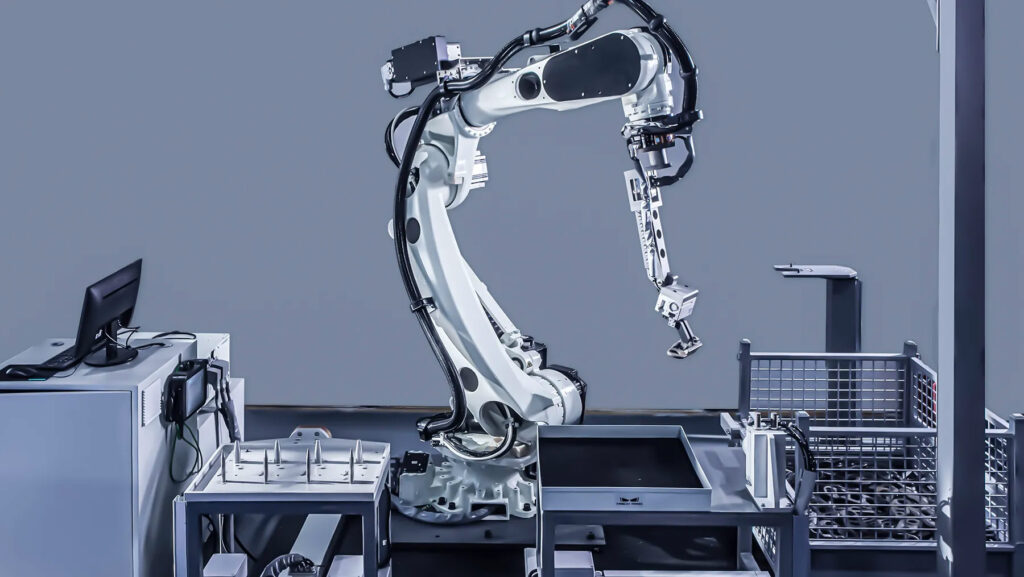
3. ロボットアームのの先端にカメラを取り付けることで、1台のカメラで複数の作業スペースに対応
4. 衝突検知と軌道計画により、現場の限られたスペースにおいて効果的に対応
成果
1. 生産品質と効率が大幅に改善
2. 単一ラインの生産能力は2倍以上に向上し、完全自動生産を実現