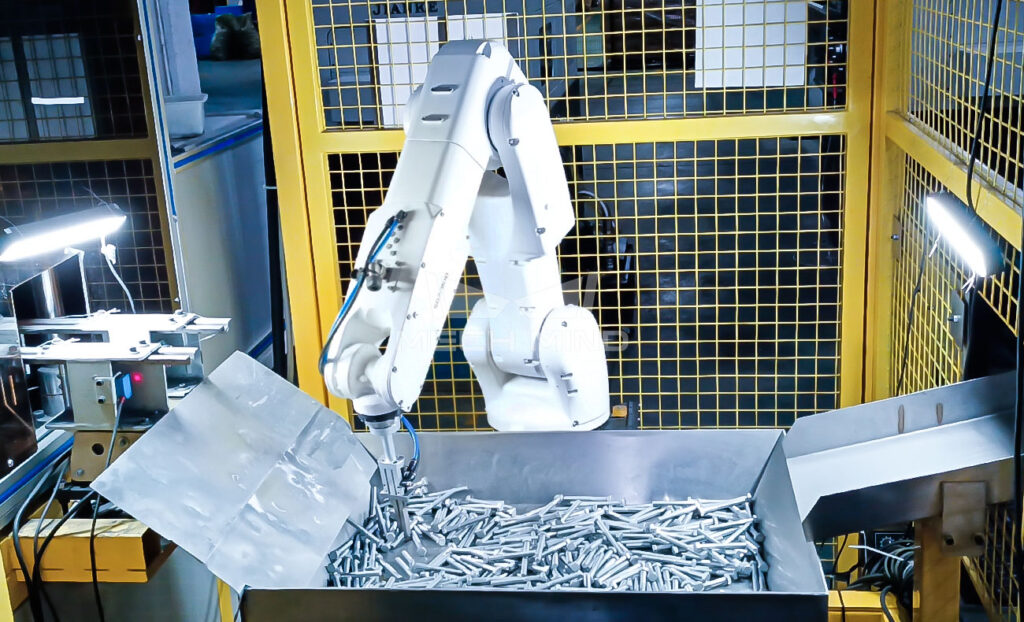
プロジェクトの課題
対象物:構造が複雑 / 形状が不規則 / 重量物 / 一定の反射あり
解決方法
1. 反射があり、複雑な構造のギアボックスハウジングに対し、高精度な点群データを生成
2. カメラをロボットアームの先端に取り付けることで、大型パレット上のワークに1つずつ接近して高精度な位置決めを実現
3. ギヤボックスハウジングの表裏を素早く識別可能
4. 先進的なアルゴリズムにより、ワークの空間位置を特定
5. ワークの傾きなどの問題に対応し、迅速で精確なピッキングを実現

成果
1. 形状が異る新品種ギアボックスハウジングに柔軟に対応
2. ピッキングの効率・精度は従来のビジョンソリューションを超過