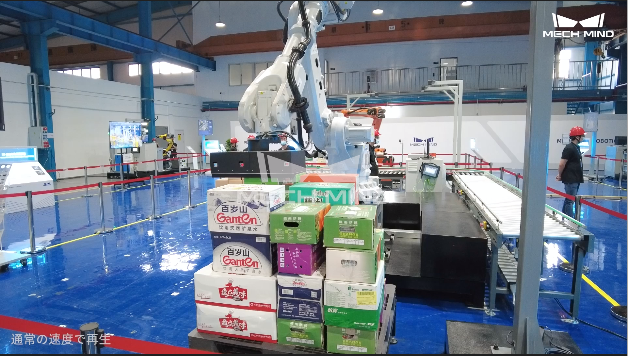
プロジェクトの課題
・対象物:規格が異なり、重量のある大量の段ボール箱
・その他:オーダーに基づいたパレタイジングを行う必要がある

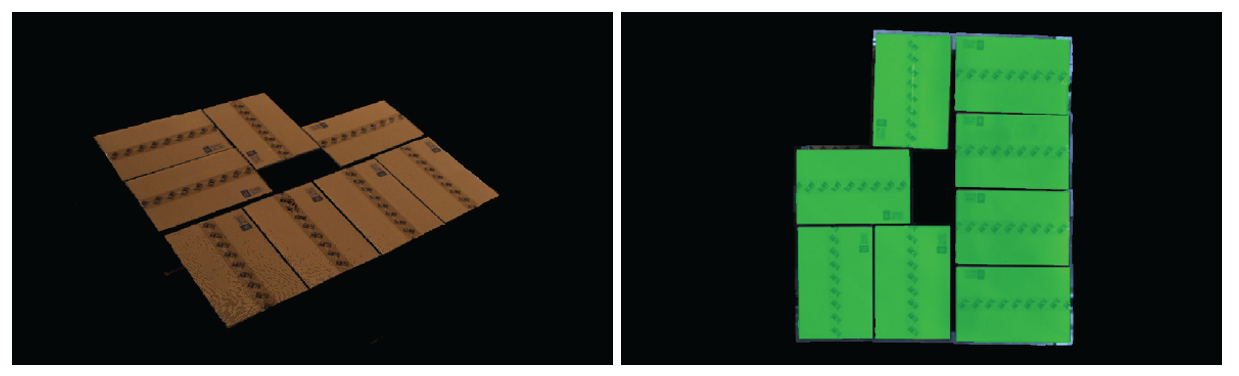
解決方法
1. 広い被写界深度のMech-Eye DEEPを使用し、倉庫内における様々な段ボール箱の規格と新品種に対し、迅速に対応
2. オーダーに基づいた最適な積付け方法を計画
3. 各段の段ボール箱が交互に積み重ねられるよう計画し、搬送中の荷崩れ問題を回避
4. 知能複数把持戦略により、混載パレタイジング時の複数把持を実現し、効率を向上
5. 積み付け方法を記録しているため、途中で電源が落ちた場合でも復旧時に前回の続きから混載パレタイジングをすることが可能
6. 衝突検出と軌跡計画により、自動的にロボットの適切な動作軌跡とエントリー角度を選択
7. 現場スペースが限られた場合でも(パレットの滞留や、カメラスタンドなどの干渉問題)を効果的に対処し、運用の安定性を向上
成果
1. 混載パレタイジングの効率は従来の2倍以上に向上
2. 倉庫の物流業務と管理コストを軽減し、全体の出荷効率の向上を実現
3. 物流センター全体の業務効率を40%向上し、コストを25%削減