プロジェクトの課題
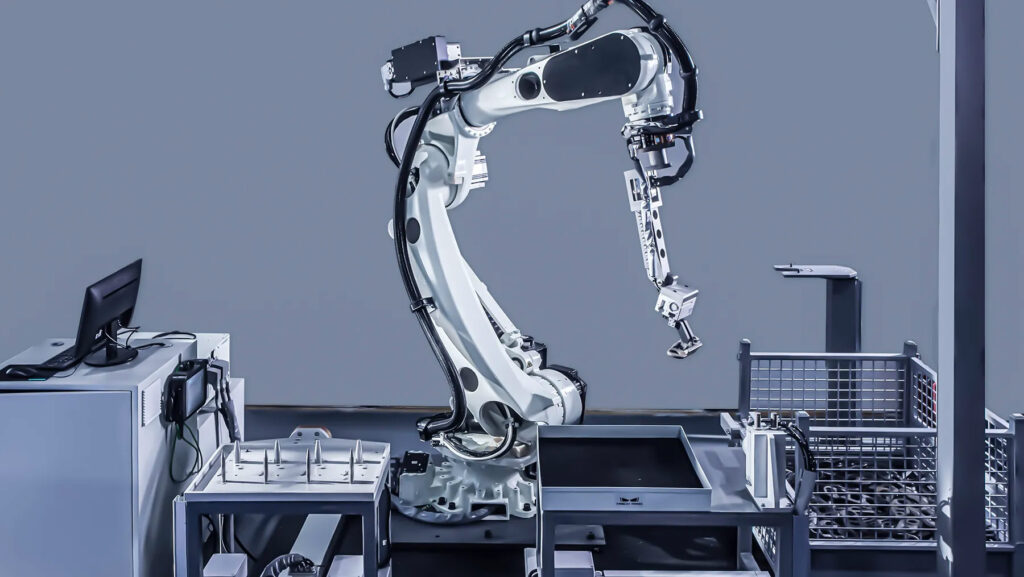
・設置位置:ロボットが大きく、比較的高い場所に3Dカメラを取り付ける必要がある
・外乱光:倉庫の入口に近く、外乱光の影響が強い環境下
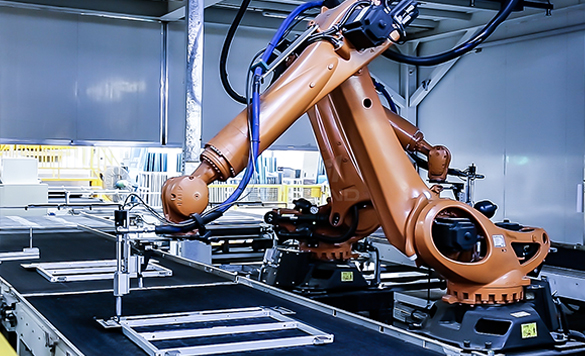
・対象物:ワークが黒く、ゴム材質で認識が難しい
・認識:タイヤの種類が14インチ~21インチと複数あり、各ワークに対して共通したプログラミングで認識する必要がある

解決方法
1. 外乱光耐性のある高精度3DカメラMech-Eye Laserにより、安定した撮像を実現
2. 画像処理ソフトウェアMech-Visonにより、1つのプログラムで多品種に対応

成果
従来、手作業で行っていた工程を自動化したことで生産性を向上